RoboDK(机器人仿真软件) v4.2.3 官方版

软件介绍
RoboDK功能强大、专业实用的工业机器人仿真工具,该软件界面简洁直观,为用户提供直观的编程方式,让用户可以快速便捷的进行软件功能操作,通过该软件用户可以连接仿真机器人进行多种应用操作,例如取放、喷涂、机器人加工等操作用途;RoboDK这款机器人仿真软件内置优化工具箱,可以帮助用户自动转化计算机辅助加工,生成机器人程序,让用户可以直接简单的进行功能操作,同时该软件拥有机器人模型库、机器人校正等多种操作功能,用户可以直接点击进行使用,非常的方便快捷。
软件功能
离线编程
工业机器人离线编程与仿真从未如此简单。 直观的用户界面,便于搭建虚拟工作环境,创建坐标系,设定机器人运动轨迹及目标,为多种工业应用预先进行离线编程。
您不再需要学习由各机器人品牌所决定的复杂编程语言。

机器人加工
把您的机器人变成一台5轴数控铣削加工机床(CNC)或者3D打印机! 仿真并将数控程序(G-code,APT 或 DXF 等程序文件)转化为机器人程序文件。 RoboDK 将自动优化机器人轨迹,避免奇异状态(singularities)及轴极限,躲避障碍。
点击这里 告诉我们您想要实现的应用,我们可以帮助您在RoboDK 中搭建案例!

机器人模型库
RoboDK 的机器人模型库包含来自20多个品牌的工业机器人、机器人外轴以及工业工具。 您可以轻松使用任一款机器人,实现任何应用,包括:加工,焊接,切割,喷涂,检测,去毛刺,以及更多。
没有找到您使用的机器人? 点击这里 我们帮助您添加!

机器人校准
您的机器人不够精确?
机器人校准功能可以提高机器人精确度、改进生产。 运行ISO9283 机器人性能测试。 利用球杆仪测试来验证您的机器人。
输出程序到您的机器人
RoboDK 的后处理器(Post Processors)支持多种机器人控制器,包括:
ABB RAPID (mod/prg)
Fanuc LS (LS/TP)
Kuka KRC/IIWA (SRC/java)
Motoman Inform (JBI)
Universal Robots (URP/script)
软件特色
1、取放
简单的拾取与放置仿真。
2、使用Python取放
这个范例演示了如何使用Python来实现取放
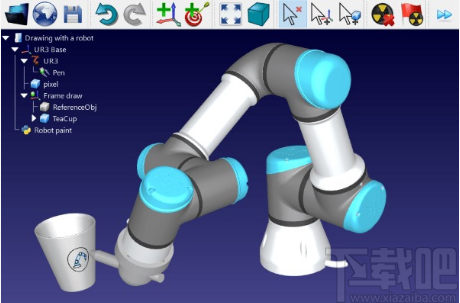
3、机器人绘图
用你的机器人仿真绘制SVG图像文件,在项目中使用来自第三方的Python库。
4、机器人铣削
把你的机器人变成CNC,轻松导入 NC-code (G-code 或 APT),生成机器人程序文件。
5、自动传送带
仿真机械传送带以及任何类似的机械装置,使用Python应用程序编程接口。
6、DXF到机器人程序文件
将DXF图形文件转化成机器人程序文件。
7、使用机器人外轴铣削
同步机器人与外轴进行铣削。
8、喷涂
生成机器人路径进行喷涂或者质量检测。
9、点焊
在软件中简单实现点焊与钻孔
10、3D打印
使用工业机器人实现3D打印的简单步骤
11、2D相机仿真
在自动生产线中嵌入2D相机进行视觉检测。
12、离线编程
离线编程意味着在生产线外进行机器人编程。离线编程避免了在线编程导致的生产“停机”时间,通过离线编程与仿真可以更好地调试与规划工作空间、避免出错。
用合适的仿真器进行离线编程将最大化机器人系统的投资回报率。给机器人设计新任务所需要的时间由数周缩短到数天,短期生产也可实现“机器人化”。
13、用 RoboDK 实现离线编程
使用该软件进行离线编程没有限制。该软件友好的用户图形界面方便了工业机器人仿真。应用程序编程接口(API)意味着您可以使用Python给机器人编程。该软件支持多种品牌的机器人控制器,给您的机器人输出相应的程序文件。您还可以根据需要编辑后处理器(Post Processor)。
Python让您更快、更有效地整合您的系统。相较于其他编程语言来说,Python更简单有效,并且容易学习。版本Python 3.7.3 将随程序自动安装.
该软件用于Python 的应用程序编程接口(API)参考资料以及范例在 这里。该软件的应用程序编程接口(API)与 C#(包括范例)以及 Matlab 也兼容。
14、机器人后处理器(Post Processor)
后处理器负责生成机器人程序文件。仿真中的任意机器人状态可由后处理器转化为相应的机器人指令。后处理器可以灵活满足生成机器人程序文件时的特定要求。
该软件为多数机器人品牌建立了后处理器。我们也可以根据需要生成适合您的后处理器。
使用方法
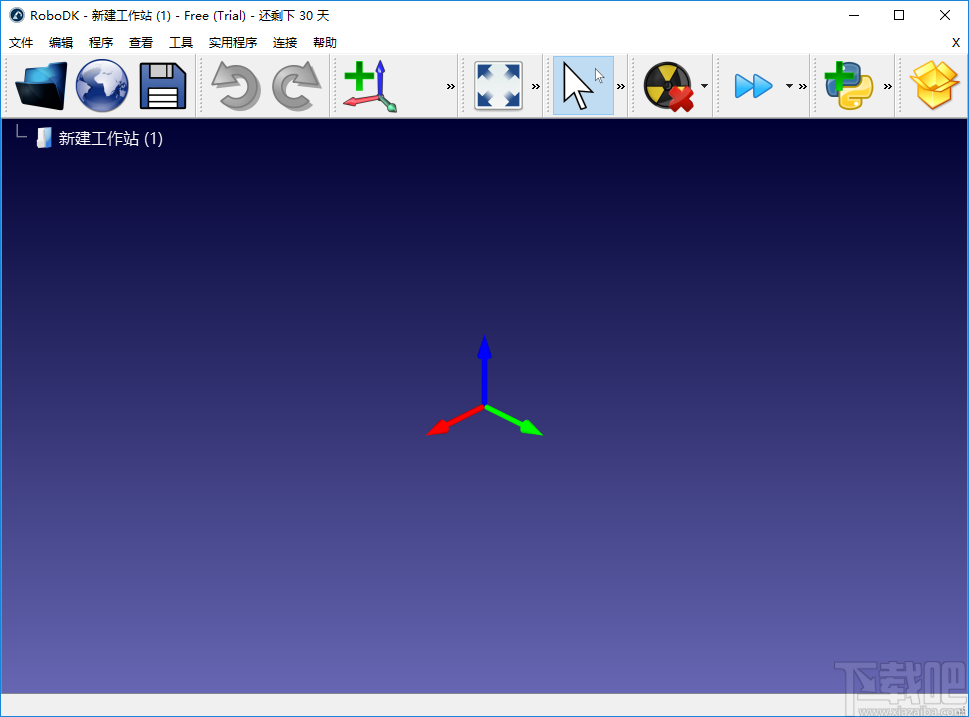
1、完成软件安装双击软件进入软件机器人仿真操作页面,改业们可以进行文件添加和项目新建等操作
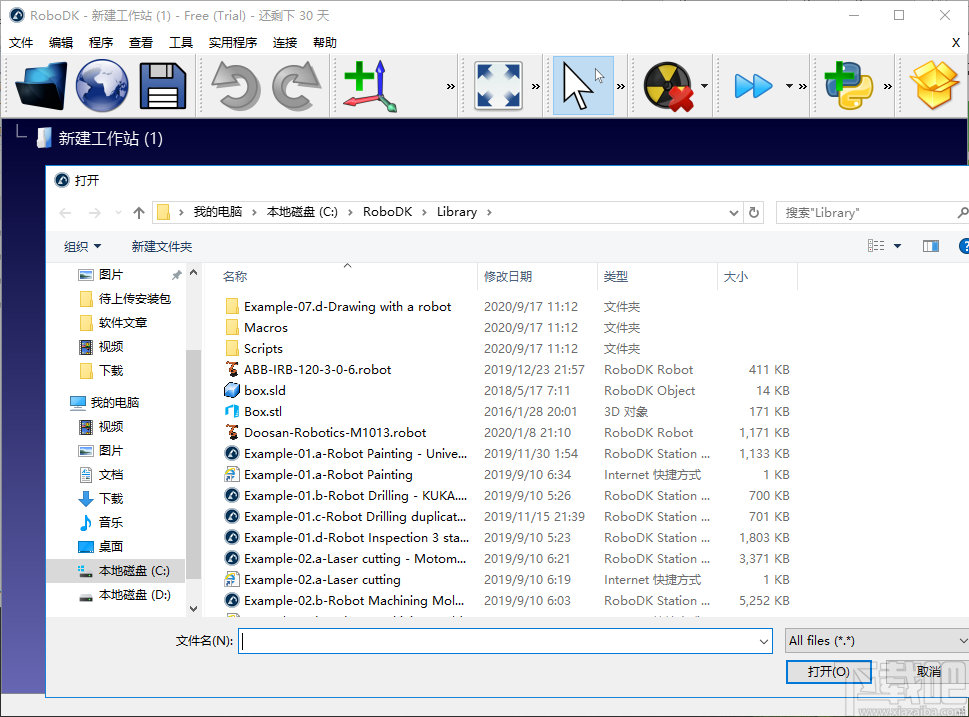
2、点击打开按钮弹出本地文件管理弹框,点击选择文件然后点击打开即可将文件添加到软件上进行编辑
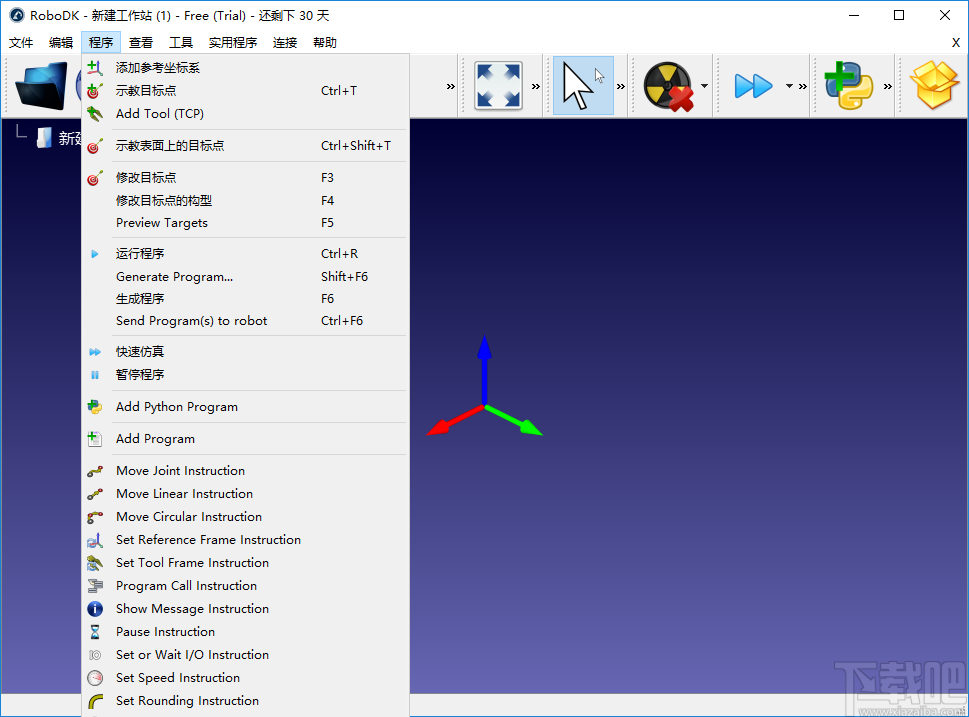
3、点击程序按钮弹出软件程序操作功能列表,点击即可进行功能操作使用
4、点击软件如图所示进入软件机器人仿真模型,点击即可模型即可对其进行下载操作
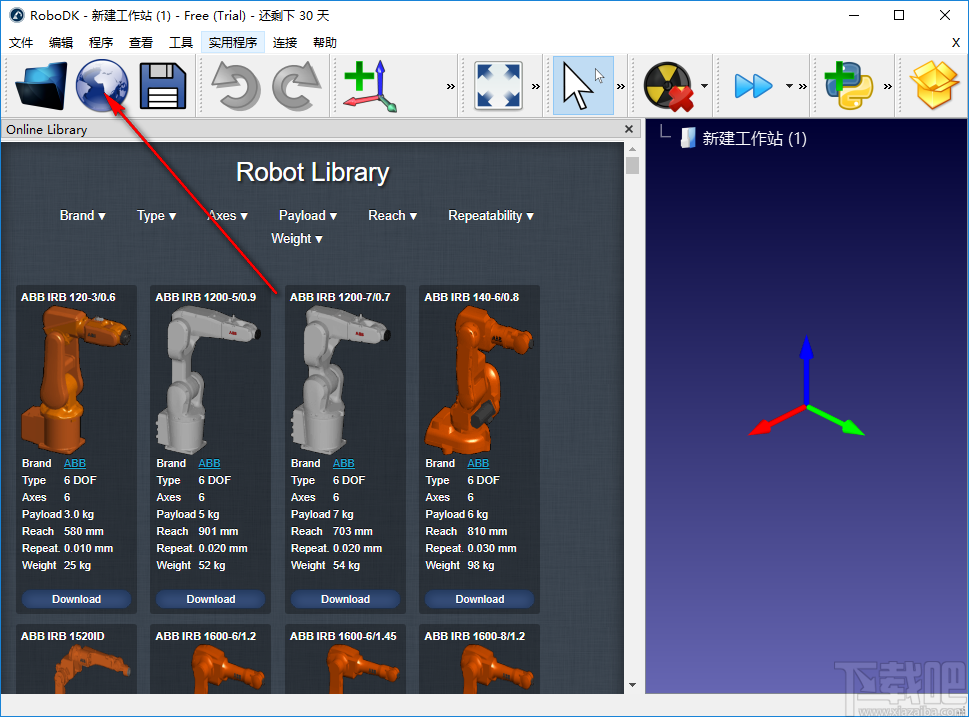
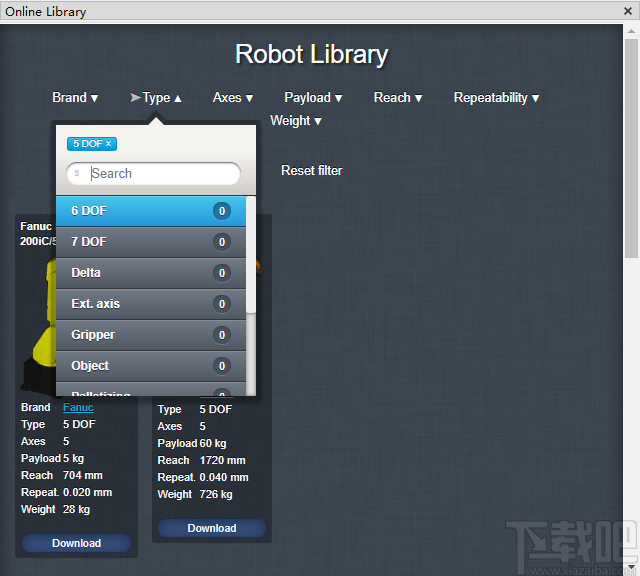
5、点击robot library 机器人管理列表,可以对其类型进行筛选选择
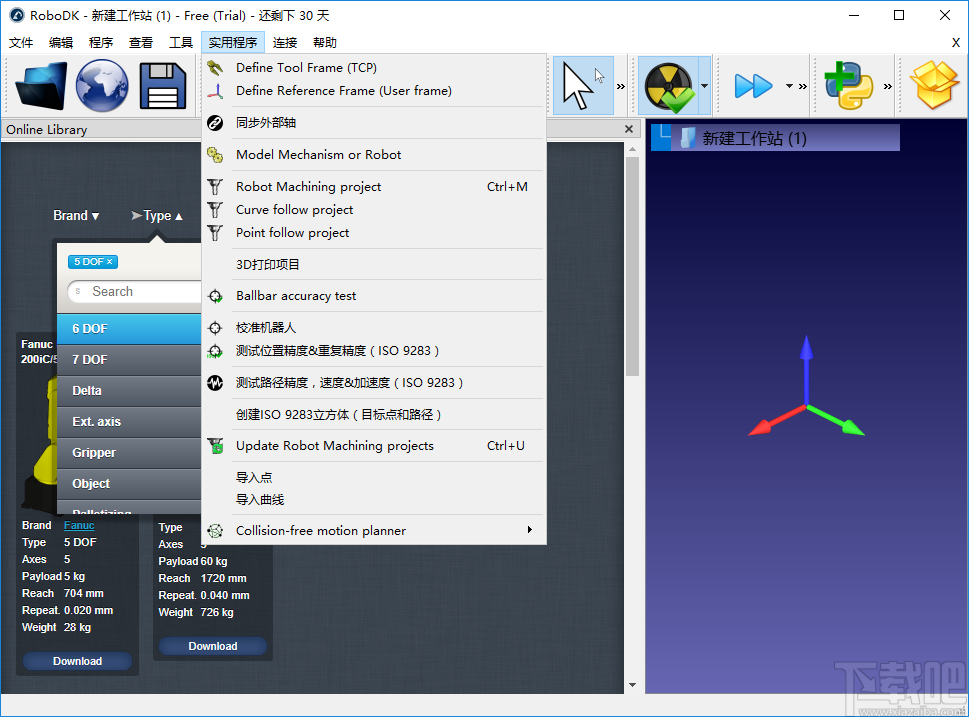
6、点击实用程序坦克车软件打印操作列表,该列表可以进行3d打印项目进行创建和校准机器人等操作
7、完成软件功能操作然后点击保存按钮即可对其进行保存,点击选择文件夹那然后点击保存按钮即可
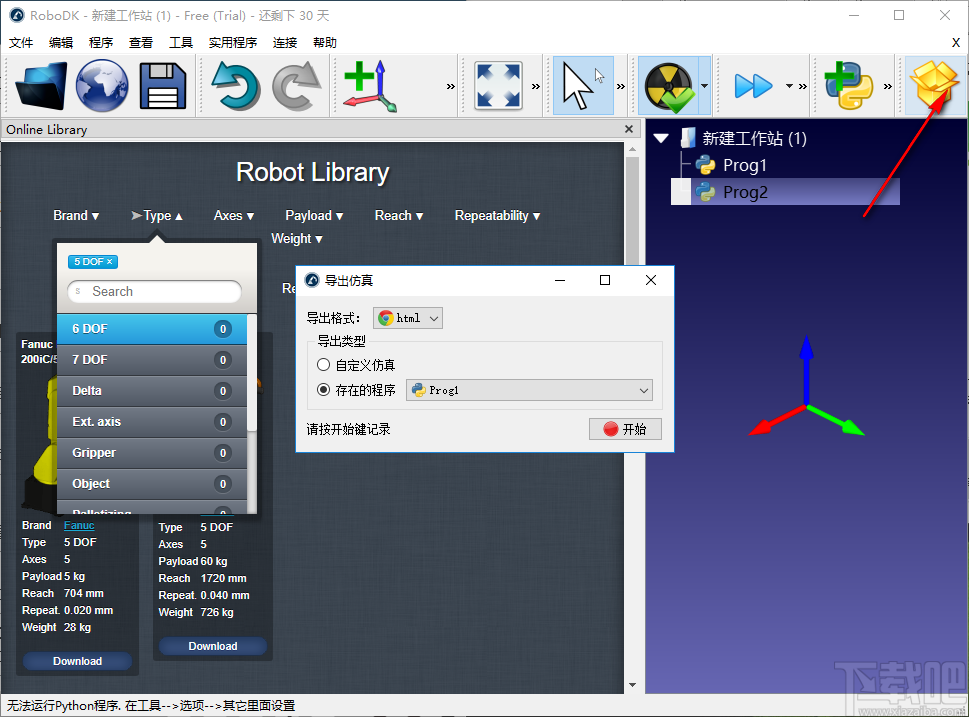
8、点击软件右上角的到处仿真按钮弹出导出弹框,点击选择导出格式然后点击开始按钮即可进行文件导出操作
使用说明
一、双击桌面上的快捷图标来启动软件。
软件界面内包括主菜单,工具栏,状态栏以及主要工作空间。左侧的工作站树形结构中显示当前工作站内的所有项目,例如机器人,参考坐标系,机器人工具,机器人程序等等。更多信息在Interface(接口)部分。
点击文件选中一个已经安装在Library文件夹中的软件工作站范例(RDK文件)并打开,或者拖拽一个工作站文件进入RoboDK界面即可加载它。
软件的机器人模型库可以通过网站访问,也可以在软件界面内访问。
软件教程中使用三种颜色来区分不同的鼠标操作:
左键单击
右键单击
双击
二、如何在机器人离线状态下,在软件中预备一个离线编程工作站。
在本范例中,为一台优傲(UR)机器人编程与仿真,实现机器人喷涂应用。
软件项目中的所有设置都被保存在RoboDK工作站中(RDK文件)。一个RoboDK工作站包括机器人、机器人工具、参考坐标系、物体(工件)及其他参数。该RoboDK工作站被保存在单一文件中(RDK扩展),而无需单独备份机器人文件、机器人工具、以及物体等。
可以在软件网站的范例部分,查看如何使用RoboDK实现不同应用的视频
按照以下步骤创建新的软件项目(RDK工作站):
1.下载并安装软件
2.双击桌面上的快捷方式
3.如果有已经打开的其他工作站:
选择File?GettingStarted-图片2NewStation(Ctrl+N)开始新的项目
GettingStarted-图片3GettingStarted-图片4
多个RoboDK项目可以同时存在于软件中。双击左侧树型菜单中的工作站图标GettingStarted-图片5激活并显示某一个项目。
多个软件项目可以同时存在于软件中。双击左侧树型菜单中的工作站图标激活并显示某一个项目。
三、Selectarobot
可以从本地文件或者在线模型库中添加新的机器人:
1.选择File?Open online library(Ctrl+Shift+O),在线模型库将会出现在嵌套窗口中。
也可以使用工具栏中同样的按钮:GettingStarted-图片7
2.根据品牌、载荷等参数找到你的机器人模型。
此案例使用UR10机器人(10公斤载荷,1.3米臂展半径)。
3.选择Download,几秒钟后机器人将出现在工作站。
4.完成机器人加载后可以关闭在线模型库。
Tip:点击在线模型库中的resetfilter将重置参数过滤器。
Tip:或者,也可以在网站上,直接下载机器人文件(.robot文件),拖拽该文件至软件窗口内或者点击File Open打开它。
Note:每当在软件中加载一台新的机器人时,一个新的参考坐标会随之出现,用于表达机器人的基坐标。
Note:从在线模型库中加载的机器人将自动备份于本地文件夹中。本范例的默认位置为:C:/RoboDK/Library/Tutorial-UR-Painting.rdk。
四、添加参考框架
参考坐标系用于物体相对于机器人,或者物体相对于其他物体在3D空间内的参照(包括位置和方向)。
Note:更多关于软件中参考坐标系的内容请参考referenceframes部分。
添加一个新的参考坐标系:
1.选择Program GettingStarted-图片9AddReferenceFrame
或者,使用工具栏中相应的按钮。
2.在树型结构或者工作空间内双击一个参考坐标系,并输入图中所示的坐标(X、Y、Z位置和欧拉角方向)。可以将鼠标移动到每个坐标值的位置,并使用鼠标滚轮快速改变该坐标系的位置。
坐标轴的的默认颜色表达:
●X坐标 红色
●Y坐标 绿色
●Z坐标 蓝色
●第一欧拉旋转轴 青色
●第二欧拉旋转轴 洋红
●第三欧拉旋转轴 黄色
Tip:选择Tools Options Display DisplayXYZaxisletters显示参考坐标系的字母标注
3.选择View Makereferenceframesbigger(+)参考坐标系变大
4.选择View Makereferenceframessmaller(-)参考坐标系变小
5.选择View Show/Hidetextonscreen(/)显示或者隐藏几何物体的名字
6.另外,按下F2键可以修改树型工作站中任何坐标系或者物体的名字
如果使用多个参考坐标系,用户可以根据它们现实中的相关性,在树型工作站中拖拽它们的位置。例如,参考坐标系Frame2可以依据机器人基坐标位置摆放,此时如果移动UR10机器人的基坐标,Frame2也会随之移动。当使用多台机器人以及参考坐标时,要注意各坐标系之间的依附关系。下图中显示了不同的依附关系。
Tip:按住鼠标右键并在树型工作站中拖拽参考坐标系(或任何物体),可以给项目重新排序(至某项目上方、某项目下方或者嵌套于该项目内)。
用户可以在不同颜色的方格中输入或者查看坐标值,这些数值代表该坐标系相对于其他坐标系的关系。多数机器人控制器根据机器人基坐标作为绝对参考来定义其他参考坐标系。在工作空间内按下Alt 键,或者通过使用工具栏中相应的按钮,可以使用鼠标拖动任何参考坐标系。坐标系移动时,它的坐标值也随之改变。
更新日志
新功能
1、当程序以圆周运动结束时,改进了机器人的加工方法/退刀;
2、改进的相机模拟选项(最小化/顶级窗口);
3、改进了png文件压缩;
4、改进的Techman后处理器;
5、改进了斗山机器人的运动学;
6、使用大型项目??时改善了缩放(缩放相对于鼠标光标下方的对象发生);
7、添加了将曲线转换为点的选项;
8、添加了将点转换为曲线的选项;
9、改进了Jaka机器人的运动学;
10、方向变化时,运动过滤不适用;
11、更改了默认选项,以使机器人加工项目的圆角为1毫米(工具-选项-CAM-程序事件);
12、改进了G02和G03导入支持半径命令;
13、为Techman机器人添加了后处理器;
14、简化几何形状可删除较小或无效的三角形(工具-选项-显示);
15、改进的韩语翻译;
16、添加了默认设置以设置转盘;
17、改进了WRML文件导入;
18、解决了命令行参数-NEWINSTANCE的问题;
19、使用大型项目时提高了复制/粘贴速度;
20、改进的KUKA IIWA后处理器(线性和线性);
21、添加了Motoman后处理器以生成笛卡尔坐标系中的所有目标(仅Motoman笛卡尔坐标系);
22、添加了重新批量计算目标的选项;
23、使用外轴时改善了轨迹显示;
24、添加了运行最后一个脚本的选项(Shift + L);
25、添加了VScode文本编辑器扩展;
26、库中的示例已更新/改进,并带有教程链接;
27、改进的Aubo后处理器;
28、提高了加载速度;
29、修复了Denso后处理器错误。
本类最新
-
台达PLC编程软件
74.82 MB/2020-08-17台达PLC编程软件(DeltaWPLSoft)是一款仿真plc编程软件,在没有真实PLC的情况下,在电脑上模拟运行PLC程序的执行情况。先点仿真,在点那个梯形图监控。就可以右击控
-
JDpaint
34.97 MB/2020-08-17JDpaint是一款专门用于雕刻行业的较好用的一个精雕软件。JDpaint精雕软件拥有曲面浮雕、等量切削等多项关键雕刻设计及加工技术,极大地增强了精雕CNC雕刻机的加工能力和对雕刻
-
SPCAD
11.4 MB/2020-08-17SPCAD音箱设计软件是一个专门用于计算音箱数据的程序。能计算各种复杂的音箱数据。有了SPCAD,一切将不再复杂。您只需要输入设计参数,所有的设计运算过程及结果SPCAD均可以帮您快捷完成,使您轻松完成音箱设计制作的工作。
-
高频变压器设计软件
59 KB/2020-08-17高频变压器设计软件(开关电源设计)是一款非常专业的开关电源设计软件,该软件具有变压器设计、电感设计、电容设计、环路控制、导线计算、电阻计算、EMO设计等诸多功能。高频变压器设计软件(开关电源设计)提供一个简单,易于遵循的方法确定变压器的要求,大容量的输入电容,二极管/整流器,初级钳位和输出电容,反馈控制环路和PI元件的选择。
-
单片机程序转换工具
1.92 MB/2020-08-17单片机程序转换工具Transfer是一款优秀专业的适用于单片机二进制程序转换工具,单片机程序转换工具能够用于pic单片机/义隆单片机/麦肯的转换。单片机程序转换工具可以将hex文件转为bin文件,供飞凌单片机烧写时使用.单片机程序转换工具简面友好,易学易用,通过简单的操作就可以掌握软件的使用方法.













- 一周最热
- 总排行榜
-
2
蓝光五金手册
-
3
Logoshop滴塑处理软件
-
4
GerbView
-
5
台达PLC编程软件
-
6
JDpaint
-
7
斯沃数控仿真软件
-
8
Machining数控仿真
-
9
EWB
-
10
SPCAD




-
2
德州游戏官网
-
3
众发棋牌平台
-
4
亲友棋牌送6元金币平台2025
-
5
神殿娱乐OL最新版
-
6
局王排列五奖表图
-
7
大公鸡七星彩官方2025下载
-
8
767娱乐彩票3.0.0版本
-
9
欢乐拼三张非应用汇版2025
-
10
王中王棋牌手机游戏
您可能感兴趣的专题
-

男生必备
男生们看过来!
-

安卓装机必备
-

女生必备
女生必备app是拥有众多女性用户的手机软件,作为一个女生,生活中像淘宝、京东这类线上购物软件可以说是少不了的,小红书这种穿搭、化妆分享平台也很受欢迎,类似于西柚大姨妈、美柚这种专为女生打造的生理期app更是手机必备,还有大家用的最多拍照美颜app是绝对不能忘记的,除此之外对于一些追星女孩来说,微博也是一个必不可少的软件。超多女生必备软件尽在下载吧!
-

迅雷看看使用教程
迅雷看看播放器是一款多功能在线高清多媒体视频播放器,支持本地播放与在线视频点播,采用P2P点对点传输技术,可以在线流畅观看高清晰电影。不仅如此,迅雷看看不断完善用户交互和在线产品体验,让您的工作与生活充满乐趣。
-

驱动精灵
驱动精灵是一款集驱动管理和硬件检测于一体的、专业级的驱动管理和维护工具。驱动精灵为用户提供驱动备份、恢复、安装、删除、在线更新等实用功能,也是大家日常生活中经常用到的实用型软件之一了。
-

拼音输入法
对于电脑文字输入,拼音输入法是一种非常受欢迎的输入法,搜狗拼音输入法、百度拼音输入法、QQ拼音输入法、谷歌拼音输入法、紫光拼音输入法、智能拼音输入法等,你在用哪款呢?一款好用适合自己的拼音输入法一定对您平时帮助很大!下载吧收集了最热门国人最喜欢用的拼音输入法给大家。
-

b站哔哩哔哩怎么使用
很多人都喜欢在b站哔哩哔哩上观看视频,不单是因为可以提前看到一些视频资源,B站的一些弹幕、评论的玩法也是被网友们玩坏了!下面下载吧小编带来了b站哔哩哔哩怎么使用的教程合集!希望能帮到你啦!
-

抖音短视频app
抖音短视频app,这里汇聚全球潮流音乐,搭配舞蹈、表演等内容形式,还有超多原创特效、滤镜、场景切换帮你一秒变大片,为你打造刷爆朋友圈的魔性短视频。脑洞有多大,舞台就有多大!好玩的人都在这儿!